Aan het eind van de 19e eeuw, toen fietsen in gebruik werden genomen, moest je er een rijbewijs voor halen. Een gerenommeerde commissie werd samengesteld om de theorie en praktijk van het rijden te onderwijzen, en om kentekenplaten uit te geven. Niemand mocht het voertuig afgeven. De reden voor de voorzichtigheid werd verklaard door het verhoogde risico van het besturen van een tweewieler. Een gewoon mens kan niet begrijpen waarom een fiets niet omvalt als hij beweegt. Verrassend genoeg kunnen zelfs natuurkundigen die de werking van systemen op wielen bestuderen, deze eenvoudige vraag niet eenduidig beantwoorden.
Theoretische analyse en natuurkundige experimenten hebben aangetoond dat gyroscopisch momentum en een positieve vorkslag niet voldoende zijn voor de stabiliteit van de fiets. Naast gecontroleerde besturing is er ook automatische besturing. Bovendien speelt de verdeling van de belasting een sleutelrol bij het handhaven van het evenwicht. Zoals u kunt zien, worden met de vrij lange levensduur van de motor nog steeds nieuwe kwaliteiten ontdekt en verfijnd.
Waarom een fiets niet omvalt als hij rijdt
Om de gemakkelijke taak uit te leggen wordt vaak een metafoor gebruikt: “het is net zo elementair als fietsen”. In feite moet men voorkomen dat het vervoermiddel valt. Aanvankelijk dacht men dat de fiets op kosten van de berijder rijdt. Een persoon voelt de helling van de constructie, draait het stuur iets in de richting van de val en nivelleert de rit. Maar bij hoge snelheid wint de fiets aan stabiliteit en zal niet vallen, zelfs niet wanneer het stuur wordt losgelaten. Later kwamen er hypothesen over de gyroscopische werking van het voorwiel en de besturing. Maar het bleek dat ongeleide fietsen en robotfietsers ook niet vallen.
De belangrijkste vraag over de oorzaak van de stabiliteit is: wat veroorzaakt de juiste verhouding tussen leunen en draaien? Er is een algemeen aanvaarde opvatting: het effect treedt op als gevolg van een roterend (gyroscopisch) koppel en een positieve vorkuitslag. De stabiliserende werking van het voorwiel en de middelpuntvliedende kracht als gevolg van de afbuiging van de beweging ten opzichte van een recht spoor zijn noodzakelijke factoren voor het evenwicht van de fiets.
Vanuit fysiek oogpunt
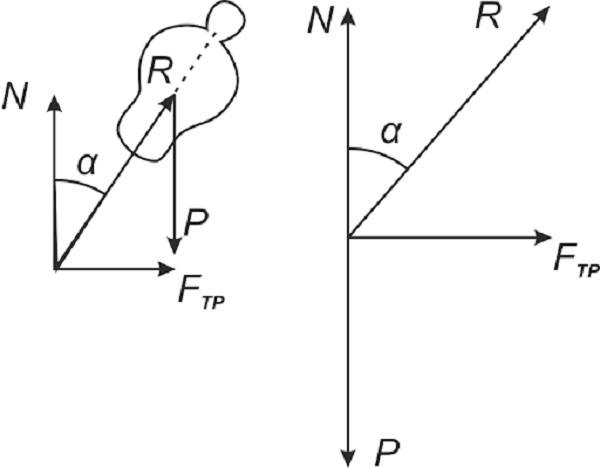
Wetenschappers hebben het patroon ontdekt dat tweewielers stabiel houdt. De voorvork staat centraal. De opstelling houdt in dat de stuuras schuin staat ten opzichte van de grond. Het snijpunt ligt vóór de lijn van contact van het fietswiel met de weg. Als de hoek van de disselboom afwijkt van de ingestelde waarde, wordt een reactiekracht opgewekt die de transporter weer in positie brengt. Zo helpt de fiets zelf het evenwicht te bewaren.
Om een bocht te maken moet de rijder het zwaartepunt veranderen. Wanneer de fiets bijvoorbeeld naar rechts is gekanteld, is de vooras ook naar rechts gekanteld en brengt het wiel, dat met de klok mee draait (van onderaf gezien), het reactiekoppel gedeeltelijk over op de stuureenheid. De middelpuntvliedende kracht heeft de neiging om het stuurwiel naar rechts te draaien. Om de bocht te maken leunt de fietser naar links, waardoor de fiets en de wielen naar rechts afbuigen.
De tweede factor voor de stabiliteit van het voertuig is de snelheidswinst bij afremmen en sturen. De stabiliserende werking brengt de wielen terug in de juiste positie en voorkomt dat de fiets omvalt. Een ervaren fietser gebruikt zijn handen op de bevestigingspunten om 2-3 mm in de weg te sturen.
Gyroscopisch effect
De evenwichtstheorie is gebaseerd op een bekend natuurkundig verschijnsel dat wordt gebruikt in de ruimtevaart, de luchtvaart en de zeevaart. De eigenschap van een roterend voorwerp om zijn bewegingsrichting te behouden wordt de gyroscopische kracht genoemd. De actie is te zien bij het schuin rijden op een fiets. Zolang de wielen draaien, houdt het voertuig zijn evenwicht en valt het nooit om. Bijvoorbeeld, een yuletide of kinderhelikopter “werkt” alleen als hij draait. Om de hypothese te testen, creëerden natuurkundigen een speciaal fietsontwerp. Aan de voorkant werd een extra wiel geïnstalleerd, dat de grond niet raakte en in tegengestelde richting draaide. Het resultaat van het experiment verraste de wetenschappers. De fiets bewoog perfect en viel niet om zonder gyroscoop.
Nu de belangrijkste factoren die de stabiliteit van een rijdende tweewieler beïnvloeden zijn bevestigd, blijven wetenschappers nieuwe versies bespreken.
Interessante feiten
V.A. Yakubovich
- De wiskundige theorie die de stabiliteit van een fiets in beweging verklaart werd naar voren gebracht door Doctor in de Wetenschappen V.A. Jakubovitsj. De wetenschapper legde uit waarom een autonome robot die een fiets bestuurt nooit is gemaakt. De informatie over mechanische fietsers die op het internet circuleert, bleek nep te zijn. Een nadere blik op de cyberneticus onthulde een aantal trucs. Uitvinders bevestigden gewichten om de stabiliteit van de constructie te vergroten, verlaagden het zwaartepunt en versnelden de rijdende fiets tot hoge snelheden.
Tegenstanders van de wetenschapper bewijzen het tegendeel. De robot leert heel snel. Dat komt door de relatieve eenvoud van de taken: je hoeft alleen maar te leren hoe je je evenwicht moet bewaren. Het heeft een vermogen dat mensen niet hebben: het reageert onmiddellijk en “beweegt” het wiel 5 keer per seconde.
- Een fiets zonder berijder kan zichzelf automatisch sturen om niet om te vallen,” beweren de Amerikaanse wetenschappers. Dankzij lineaire stabiliteitsberekeningen hebben de onderzoekers een fiets ontworpen met extra wielen die in tegengestelde richting draaien en een negatieve stuurstand.
- De mening verschilt van de hypotheses van fysici. De energiebronnen van de motor zitten in het hoofd van de rijder. Het menselijk brein werkt hard om te voorkomen dat we omvallen. Het is het onderbewustzijn dat de fietser in balans houdt.
Conclusie
Het belang van de gyroscoop en het zwenkwiel om de fiets stabiel te houden tijdens het fietsen is bewezen. Maar er is geen duidelijke verklaring waarom een fiets niet omvalt als je rijdt. Er kan een bijkomende kracht zijn, waarvan het begrip tijdelijk buiten de huidige kennis valt.






Toch denk ik dat de motor niet omvalt tijdens het rijden omdat de rijder zijn evenwicht behoudt en dit corrigeert door het stuur te draaien in de richting van de val. Het effect van een gyroscopisch koppel op het wiel tijdens het rijden is onwaarschijnlijk, de snelheid van het wiel en de massa van het wiel zijn niet groot genoeg om een reactief koppel te creëren.
Het stuurexperiment bevestigde niet dat de rijder het evenwicht bewaart. Duw de fiets hard zonder de berijder, hij zal rijden en niet omvallen, zelfs als het stuur vastzit.